
Designers: Vishal Parikh, Peter Bohlen, Andrew Pappa, and Ben Wiener
Client Coordinator: Earll Williams
INTRODUCTION
Our clients are students at a local middle school who have severe and profound disabilities. Most of these students use manual wheelchairs that they cannot propel independently. They enjoy movement, as they smile and laugh when their teacher enthusiastically rocks their wheelchair. However, this becomes tiring and time consuming for the teacher. The goal of our project was to design a platform that can safely rock a wheelchair under the control of a teacher or aide. The device should produce tilting motion in four directions: left, right, forward and backward. In addition, the device should be capable of being stowed in a crowded classroom.
http://www.youtube.com/watch?v=uLMAO_xfqts
SUMMARY OF IMPACT
The device will allow the clients at Lowes Grove Middle School to enjoy the sensation of movement while seated in their wheelchair. One of the instructors at the school stated that “this was a real treat for us to watch. I really enjoyed watching [the client] having fun, smiling and laughing, and pushing his buttons. It’s a good sensory activity for the kids since they are limited in their mobility. So it was a real treat, thank you.” Therefore, we believe that our device made a beneficial impact for the clients and will continue to be a great device for future students.
TECHNICAL DESCRIPTION
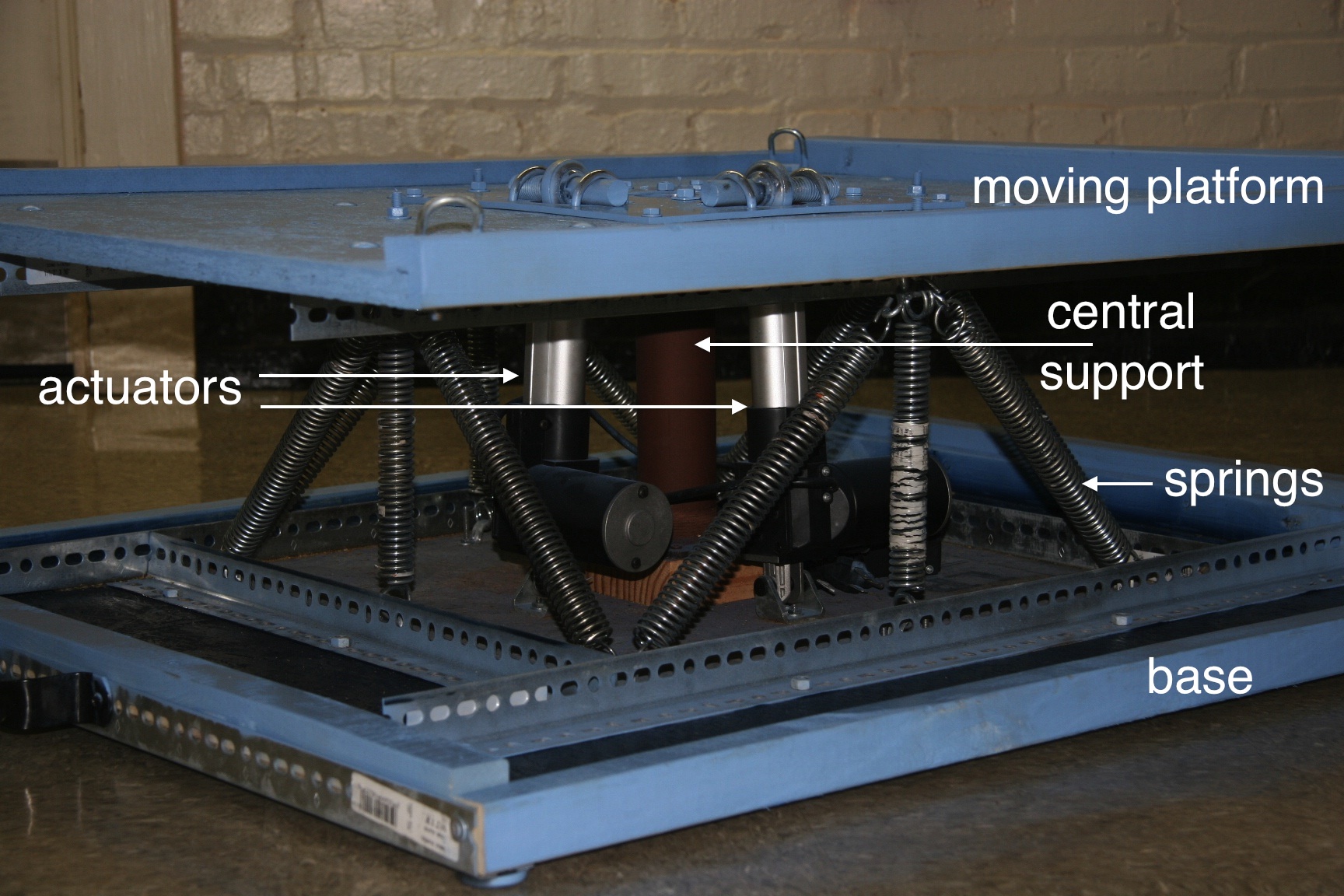
Figure 1: Side view of the Wheelchair Accessible Motion Simulator
This device consists of a static base, a moving platform, and a control system to activate the movement. The base is made out of ¾” reinforced plywood with dimensions of 36”x40”. This wide base of support prevents the device from tipping over during use. Metal braces were attached to provide extra strength and prevent the wood from warping. These were arranged around the perimeter of the base. A central support is attached to the geometric center of the base, and it supports most of the weight of the moving platform and the client. At the top of the central support is a ball and socket joint, which connects to the moving platform and allows tilting in any direction. Additionally, 12 springs connect from the base to the platform and are used to provide further support of the platform while allowing for its motion.
The control system consists of two linear actuators, along with their power source and joystick controller. The actuators are bolted to the base, and the moving arm is attached to the platform with ball and socket joints. As a result, there are three points of support between the base and platform: the central support at the origin, an X axis actuator, and a Y axis actuator. Using the concept that three points create a plane, the device is able to tilt through a range of angles in any direction, while still remaining sturdy. The actuators are located 4.5” away from the origin. This was the ideal distance to provide the desired range of tilt angles and angular velocity, in addition to providing the required force. These actuators are rated at 400 lbs of force and move at a speed of 0.59”/sec. Furthermore, these actuators have a stroke length of 2”, which provides approximately 12.5 degrees of angular movement front to back and side to side. The actuators are connected to a power supply. The teacher or aide moves the actuator using a joystick, which allows intuitive control of the tilting in all four directions.
The platform, which is made out of ¾” reinforced plywood, is where the client’s wheelchair sits during use of the device. The teacher or aide secures the wheelchair onto the platform using straps which are manually tightened with a ratcheting system. In addition, there are metal supports on the underside of the platform, arranged in a geometric rectangle around the connection to the central pivot. This provides extra strength to the platform. There are a number of connections between the base, the control system and the platform as described above. A wooden ramp was also constructed to permit the teacher or aide to easily wheel the students on and off the platform.
The cost of the project was $650.

Figure 2: Client enjoying a ride on the Wheelchair Accessible Motion Simulator, currently tilted to his right and back.
University Operator: (919) 962-2211 | © 2024 The University of North Carolina at Chapel Hill |